














































































312
127
人生如戏,全靠“眼技”——伊莱克斯 Pure i9 3D Vision智能机器人吸尘器/iRobot Roomba 970 对比评测
2019-03-12 12:20:00
56点赞
86收藏
45评论
前言
感谢这次众测机会。
写过两篇关于扫地机器人的文章。

这篇对比了米家扫地机器人与iRobot Roomba970,对比测试发现iRobot确实在扫地机器人方面基本在行业领先水平。

基于第一篇被米粉围攻的几个观点,再写了篇总结,审视了2018年整个扫地机器人市场的行业状况,解析了扫地机器人目前的几种工作方式,以及工作原理(为了怼回去 )。
)。
文章也不可避免的围绕火热的米家石头扫地机器人展开对比,其实并非米家/石头是最好的,但不可否认的是石头算性价比非常高的扫地机器人,不过从扫地机器人行业来看米家/石头并没有太多其他突出点,在其他家的新品层出不穷之后石头的卖点居然只是5200mAh 的大容量电池,而其它方面都是中庸水平。

文里提到导航系统的发展,实际上并不是小米让扫地机器人进入千家万户,而是整个导航定位路径规划系统这个机器人行业的技术进步为消费者带来了真正实用的扫地机器人,这些导航解决方案都是能买到的,不存在哪家厉害很多,还高出业界一大截,唯一的区别是研发经验上的差别,谁调教的跟细致,更人性化。

芯片决定了功能,业界的解决方案无非就那么几个,功能名字变来变去但实际上都无出其右,芯片决定了扫地机器人的最高智力,导航方式规划系统决定了扫地机器人的行为表现。
就目前而言,扫地机器人行业竞争已经进入白热化阶段,众测频道里就可以看出来,隔三差五就有新品扫地机器人上线众测,产品琳琅满目,不时的有新品牌新对手,国产尤其多,美国货也不少,各大传统家电厂商纷纷加入战场。
不过大多数都是LDS激光导航,并无新意,看看导航系统就知道,实际上并无太多本质区别,无非就是换个外观,内部用业界通用的配件组装下,根据用料区别分个高低价位档次而已,再做个配套APP,有现成的导航系统可以借鉴,入行门槛目前可以说是非常低了,继续做LDS导航的扫地机器人的话,很快就会变成换个壳卖外观的行业了,于我们消费者而言则是天花乱坠的看不懂的功能宣传与没什么实质区别的产品体验。

看到站内众测的这款宣传“有些东西一次都不能碰”的伊莱克斯 Pure i9 3D Vision智能机器人吸尘器我是眼前一亮,按导航模式来说,这是业界比较新的工作方式,也许这就是一款在我文末展望过的真·3D识别建模+AI识别的扫地机器人。
感谢张大妈提供的体验机会。

下文评测部分我将进行iRobot 970与这款伊莱克斯 Pure i9的对比测试,看看伊莱克斯这款伊莱克斯 Pure i9 3D Vision智能机器人吸尘器到底是什么水平,看重点的可以直接从对比测试开始阅读。
开箱/外观
蓝黑色包装箱,盒体上的扫地机器人为黑色,实际上黑色更好看……但其实里面是金色款。

没有过对的宣传语,仅展示了吸尘技术以及产品名“PUREi9”

侧面铭牌显示为金色,产地广州,注册地址还是长沙,这地址真亲切,走路十分钟就能到。

开盒第一层有个简易的快速上手指导,充电、连接无线网络(仅支持2.4gHz),然后开始清扫。

下层为扫地机器人,不过这里伊莱克斯PUREi9称为吸尘器机器人,同样叫这个名字的有戴森吸尘器机器人,二者都是吸尘器技术在业界比较知名的厂商,不过戴森的eye360看起来很美好但是实战不怎么样,这里就不再吐槽了。
伊莱克斯PUREi9称为吸尘器机器人的话……先把悬念放这里,下文实战评测将进行解读。

机器人装在一个帆布收纳袋里,这点比较人性化,不用时可以用收纳袋装起来放进储物柜里。

机器人真容,采用了三角形的外形设计,类似Neato D5的D型设计,优点是辊刷与吸口位于前部,通过边刷清扫的灰尘会马上被吸入,易滚动的固体垃圾也不容易逃脱,减少了击飞的现象。同时辊刷更靠近外部,对于墙角也有更好的清洁能力。

下部为配件层。

100~240V,50~60Hz宽幅电源适配器,全球通用,输出22v 1A,同样为中国制造。

毛刷、胶刷混合式的辊刷,这种设计兼顾了地面刮取与灰尘,但劣势在于容易毛发缠绕,不过业界普遍使用的是这样的辊刷设计。

附件:尘滤,提供了一片备用尘滤,尘网面积非常大,有很好的气体通过性,减少吸力损失,米家以及iRobot 970的尘滤只有这款的一半。

附件:边刷,原装个边刷,易耗件,不多说,常规水平。
八国语说明书,再怨念一次,黑色真的好看多了。

充电底座,未发现传感器,尚不明回充定位原理,可能仅靠视觉系统就能搞定。

制造商伟创力电源(东莞)有限公司,看起来没有很高的技术水平。
再来看看机器人主机。

最吸引人的是这个3D vision,硕大的“眼睛”,加上产品广告介绍我可以初步判断出 伊莱克斯PURE i9 的导航以及路径规划与以往的产品完全不同,因为确实没有看到其他的传感器。
像iRobot 970在顶部配备了视觉导航摄像头,底部有防跌落和污垢探测器,米家等激光导航扫地机器人顶部需要旋转式的LDS激光雷达,360这样的汽车自动驾驶导航技术需要传感器,而伊莱克斯PUREi9 全凭这枚“眼睛”以及两侧的激光发射器,孰好孰坏目前不敢做定论,等测试再说。

初步预计工作原理类似人眼,左右两侧分别发射不同波段的激光,或类似分时视差技术左右激光间隔闪烁来区分不同的“眼”,“眼睛”部位的摄像头除了接收可见光外分别能接收额外的激光反射信号,对于人眼而言双眼的视差带来距离感,而机器人则可以根据视差计算出物体轮廓与距离。

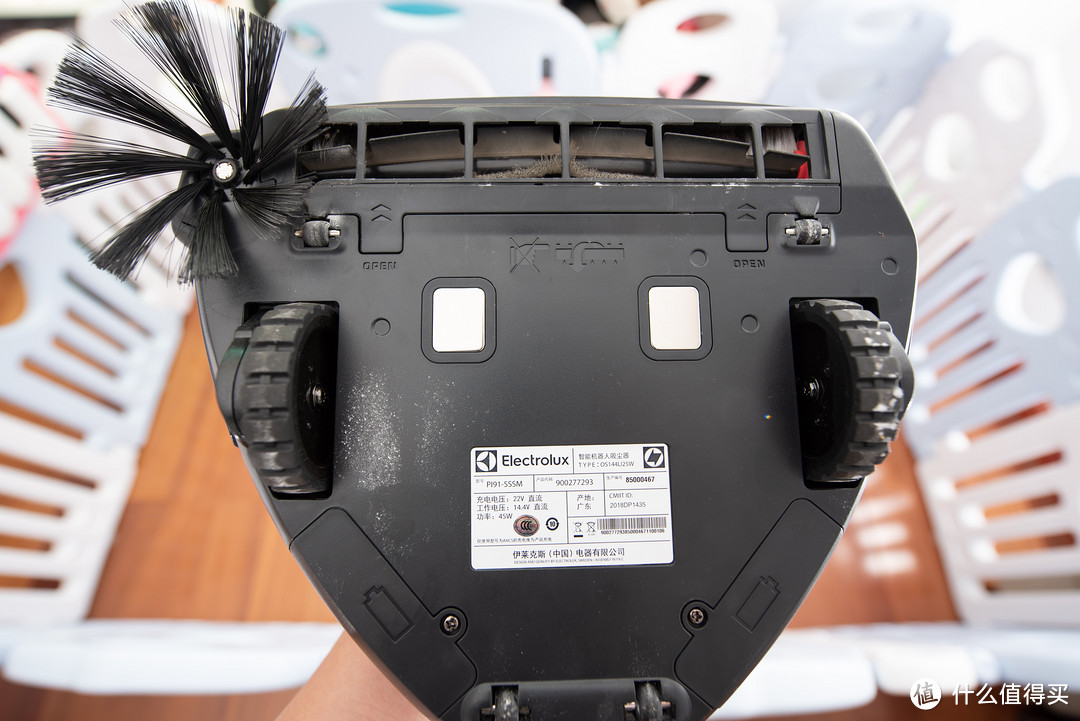
再看底部,主动轮/从动轮,充电触点,辊刷,边刷,除此之外没有任何辅助传感器了。
一切全凭一只眼,我的兴趣又更浓了,且看实战表现了。
不过还是先把细节看完。

电池仓,双侧分别设计有一个电池仓。

卸下螺丝即可倒出电池,标注参数为18V 18瓦时,瓦时换算成毫安时约为10000mAh,电量可怕,大概是为了带动吸尘器,官方给出的续航时间节能模式约1h,220㎡,标准模式40分钟,如此容量电池全力输出续航仅40分钟,看来吸尘器部件是耗电大户,看电池夹外形可知为4节18650型锂电池,2500mAh×4.

尘盒设计在顶部,按下尘盒开关即可开启,避免抬起整个机器人。

尘盒与滤芯一体的设计,方便同时清洁。

边刷,八爪鱼高密度边刷,常规设计,亮点在易拆卸,缠绕发丝更容易取下来。

另外充电座带电线收纳设计,避免多余的裸露在外。
外形设计上的三角形是比较有信心的设计,都知道三角形比圆形脱困更难。
按照上篇扫地机器人选购策略文章,伊莱克斯PURE i9的特质在于:三角形机身,3D视觉导航,大容量的电池与尘盒,防缠绕。
对比测试
下面是对比测试。
测试项目参照这篇文章进行,由于米家扫地机器人已经对比过,且是老旧产品,不再拿出来测试了,不过可以与这篇对比,项目差不多。
外观对比
测试前还是做个外观/体积上的对比。

肉眼可以看出明显伊莱克斯 Pure i9比IRobot970小不少。

叠在一起更加直观。

不仅外形尺寸小,厚度上也更薄。

大眼睛特写,比起iRobot970的仰望星空眼(摄像头仅为了采集天花板特征,靠天花板导航),伊莱克斯Purei9的眼更为有用。

充电座合体,占用空间上伊莱克斯purei9更少,且贴合度更高。
不过不要高兴得太早,毕竟作为业界老大的iRobot 是个可怕的对手。比起iRobot公司里一水的麻省理工机器人专业男调教下的扫地机器人,伊莱克斯算是个新人,此前仅在1997年出过扫地机器人,再无其他同类产品,且反响平平,这次又直接上了算是业界最新的第四代视觉导航,少了软件上的细节处的规划计算效能上可能有比较大的差距。
----------------------------------------------------------------------------------------------------------
作为一个扫地机器人,首要order是:我在哪儿?要到哪儿去?怎么去?
既然两款都是视觉导航vSLAM,智能程度高的话还要加上:去不了怎么办?能不能去?
所以测试分为以下部分:
1.导航系统对比测试。
2.清洁效果测试。
3.悬崖探测测试。
4.学习/记忆功能测试。
5.噪音测试。
6.越障/躲避障碍测试。
导航系统对比测试
导航原理/功能
伊莱克斯 Pure i9
前文已经做了不少铺垫,第四代导航,不出意外的话应该是AI+vvSLAM+图像识别。

vSLAM是必然的,毕竟全身的传感器就只靠一个摄像头了,测绘成像原理靠的是激光,这里算是偷懒了,因为纯图像识别3D建模可能需要大量的图形计算能力,而通过激光则与DLS模式的激光导航一样,只需处理线图,自然省事得多,这种技术现在无人驾驶汽车上运用的比较多,且逐渐成熟。
AI体现在地图规划,地图绘制。
图像识别则是依靠摄像头,像识别地面材质就是图像识别能力,不过激光是否也能辅助识别地面材质不得而知了,同时像iRobot的污垢识别也应该是可以实现的,不过精细度应该是比不上iRobot,毕竟i家是光学+超声波双重识别污垢。

官方只给出了这样的类似描述,我只能认为伊莱克斯 pure i9 的图像识别是设置为躲避一切障碍物,这也符合宣传语“有些东西一次都不能碰”,以及绕过地面上的各类电线这样的行为。
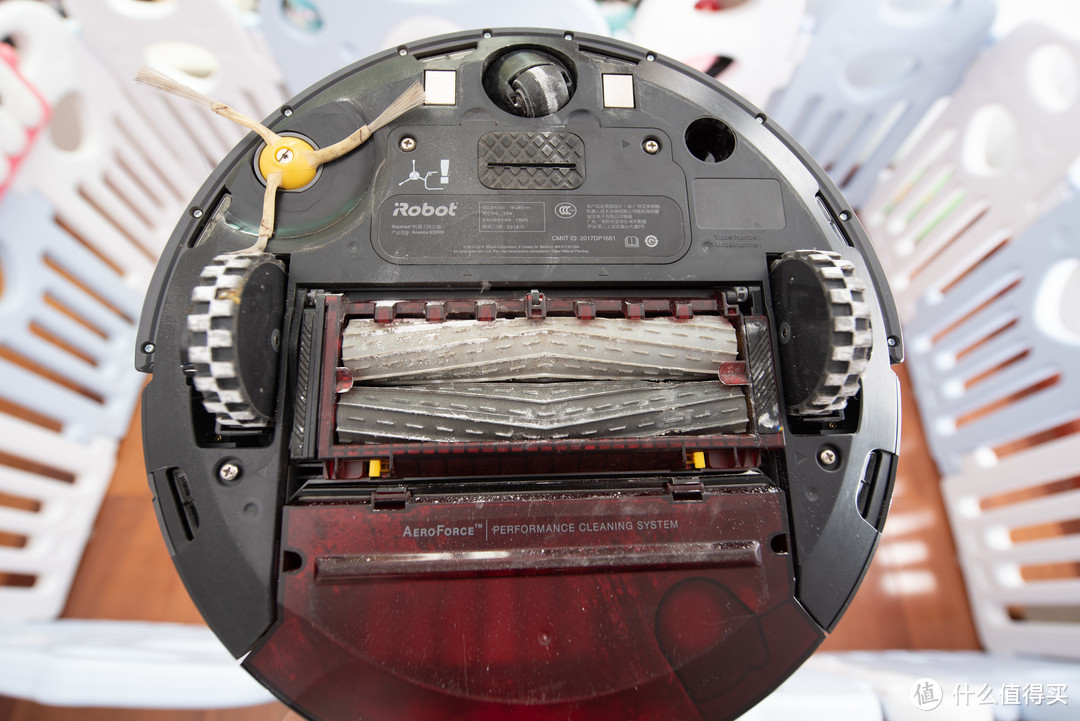
iRobot Roomba 970
就不长篇赘述了,对比小米的时候我的认识不太准确这里更正下,iRobot 970实际上主要的路径规划是依靠“祖传”的调校多年的碰撞式路径规划系统iAdapt2.0,对准天花板的摄像头的vSLAM计算只是用于确定自己所处的位置以便大面积清扫,单个房间甚至用不上vSLAM摄像头,这就是为什么iRobot Roomba 880 这个系列需要导航盒来进行多个房间清扫,而9系列不再需要。
测试方法:同一块区域延时摄影记录行走轨迹。
我选择了家里相对比较规整的区域进行测试,但也每个门口都有门槛石,门槛石前有门压条等障碍物,稍微有点复杂度,但总体比较简单,测试清扫覆盖面积,以及效率。
伊莱克斯 Pure i9
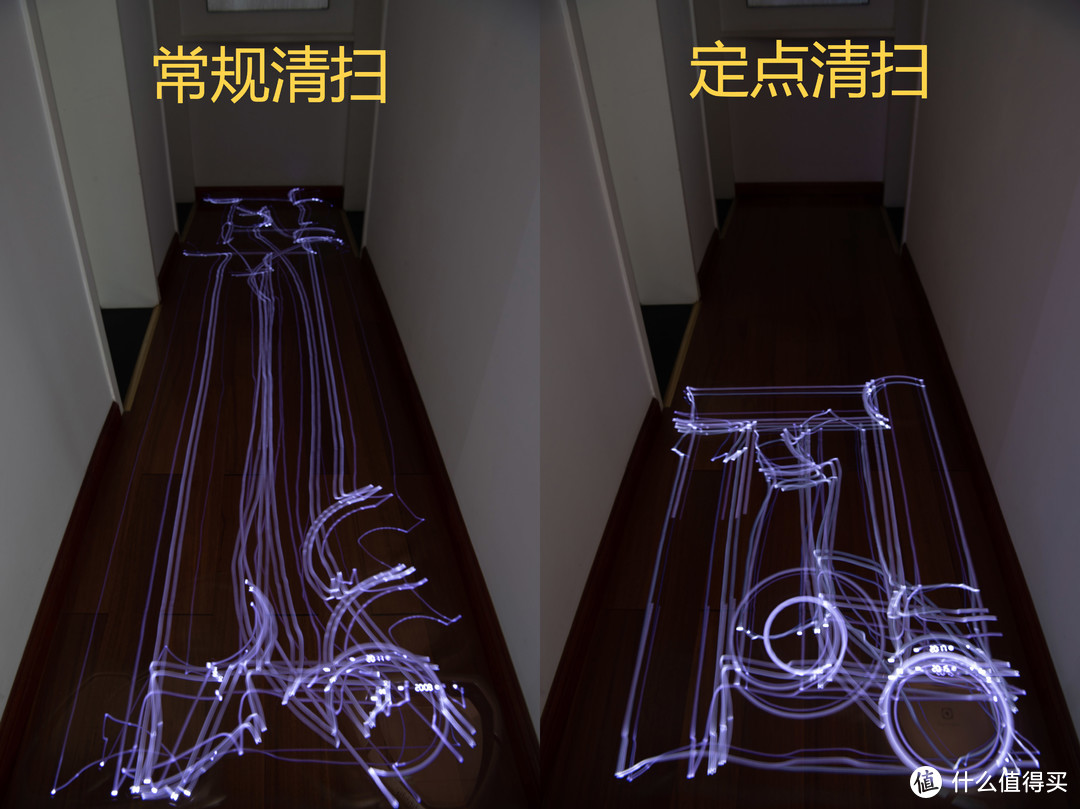
有两种清洁模式,常规模式进行一次清扫覆盖,定点清扫模式则进行一个小范围的两次清扫覆盖。
iRobot 970
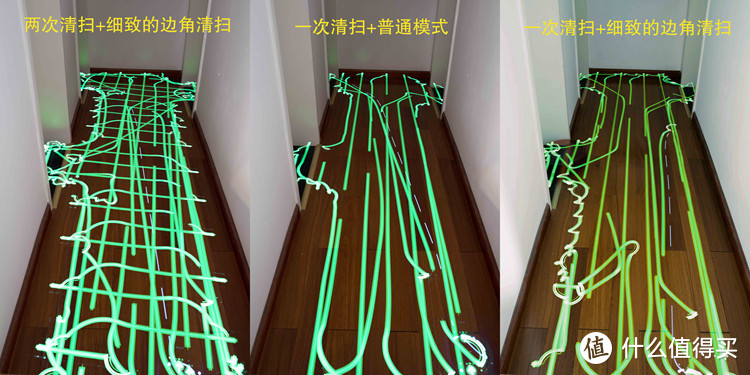
轨迹上 Roomba 970 分三种轻扫模式,分模式进行了三次测试,轨迹图如上。
对比起来iRobot 970模式更多覆盖更细致,伊莱克斯 Pure i9的定点模式仅在2×2m的小范围进行两次覆盖清扫,但单次清扫覆盖率差别不大,而且伊莱克斯 Pure i9的效率更高,从轨迹上看伊莱克斯 Pure i9可以识别边沿与地面状况,没有过于纠结门槛位置,直接走出了规整的路线,整个清扫过程仅3-4分钟。而iRobot的单次普通模式花费时间更长,且频繁的在门口撞击试探。
伊莱克斯 Pure i9的眼睛似乎能够识别狭小空间,容纳不下机身的狭小空间并不会去试探。
2.清洁效果测试
抛开iRobot的多次清洁的方式,这里直接使用单次清扫的清洁度做评价。
清扫测试物品:
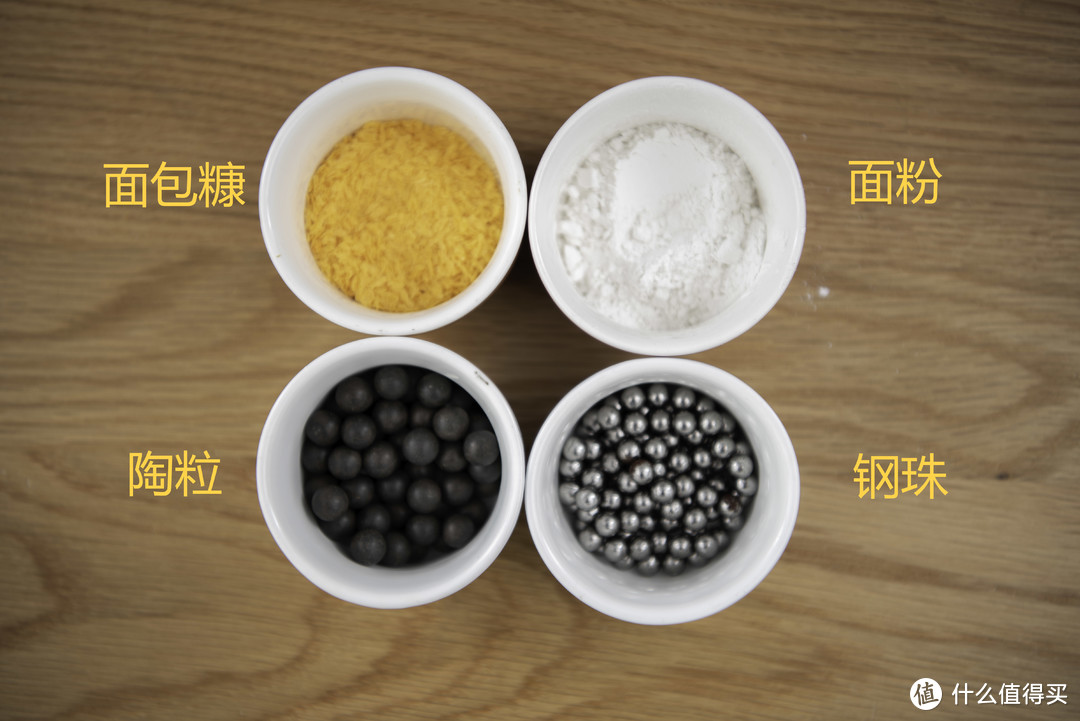
清扫垃圾测试升级了,保留了常规像面包糠这样的大小不一的细小垃圾,面粉类的粉尘这两种符合大部分家庭的地面状况。
另外换了陶粒与钢珠。

毕竟宣传用语给了2000Pa大吸力这样的字样,并且普遍说可以吸钢珠。
那就看实战表现吧。

测试空间与之前的文章一致,方便对比。
伊莱克斯 Pure i9 钢珠清扫


尘盒内没有一粒钢珠,全被推走了,可能钢珠的直径不够小,未能进入吸尘口。
iRobot 970 钢珠清扫
由于伊莱克斯一粒都未吸入,我减少了钢珠数量,iRobot能吸入则胜出。


尘盒内吸入了少量钢珠,部分被边刷打飞,不过对比起伊莱克斯,iRobot略胜一筹。
伊莱克斯 Pure i9 陶粒清扫


与钢珠同样的情况,轻质的陶粒并未能进入吸尘口,伊莱克斯底盘设计较低,大颗粒垃圾会被挡在外,所以并不能以此来做吸力的判断。
iRobot 970 陶粒清扫


与钢珠一样的情况,少量击飞,部分能够吸入,高底盘和胶刷在这项测试中占优势,实际上iRobot并不是吸力更大,而是胶刷的结构更加容易卷入颗粒物固体,不易逃脱。
吸力上,我之后试过用戴森吸尘器吸钢珠,十分困难,应该是钢珠尺寸较大的原因。
伊莱克斯 Pure i9 面包糠清扫


面包糠的清扫上伊莱克斯Pure i9显示出了高水准,地面几乎无残留,除了面包糠还吸上来不少灰尘。
iRobot 970 面包糠清扫
iRobot 970在清扫面包糠上并没有伊莱克斯Pure i9清洁度高,边刷击飞了不少颗粒装固体,清扫完成后仍有不少碎屑。
伊莱克斯 Pure i9 面粉清扫

与面包糠一样,非常高的粉尘清洁度,地面几乎无残留,只在木地板缝隙中有少量残留,同时并没有出现“填缝”现象,不会把面粉扫到缝隙中并压实了,这是前置宽口吸尘口的设计优势,同时毛刷/胶刷混合式的辊刷也更适合粉尘类清扫。
不过清扫规划上似乎出现了偏差,遗漏掉了一小块,可能区域太小的原因,但这一定是计算出现了偏差。
iRobot 970 面粉清扫

iRobot 970则不太乐观,之前文章是在两次井字覆盖之后才达到不错的效果,但这里明显比伊莱克斯Pure i9差不少,单次清扫不但面粉糊了一地,而且缝隙中也被压实了,效果十分不理想。

再给个米家扫地机器人的作参考,一次清扫的清洁效果iRobot 970与米家扫地机器人并没有太大差别。
清扫过面粉后的底面对比,整体上伊莱克斯Pure i9沾染更少更干净,iRobot 驱动轮与胶刷位置沾满了面粉,且不太好清洁。
小结:所以实际上二者各有所长,iRobot的双胶刷确实对大颗粒物有非常好的效果,但是对粉尘清扫能力一般,而伊莱克斯Pure i9的前置辊刷设计很好的解决了粉尘类的清洁问题,不过机身偏低,会推开不少垃圾,对较大颗粒固体的清扫能力不足。
3.悬崖探测测试。
伊莱克斯 Pure i9

iRobot 970

对于悬崖探测都十分灵敏,不过行为方式上有所区别,iRobot是依靠底部的悬崖传感器,而伊莱克斯Pure i9是依靠“眼睛”视觉判断,所以最终行为上莱克斯Pure i9原地转圈,因为能看到前面的悬崖,而iRobot 970是跑到悬崖边的“悬崖勒马”。
4.学习/记忆功能测试。

伊莱克斯 Pure i9 3D的宣传号称3D建模,3D建模的最大优势在于可以得到整个房间的结构图,精细到每一处桌角,每一个细节都能“记住”。
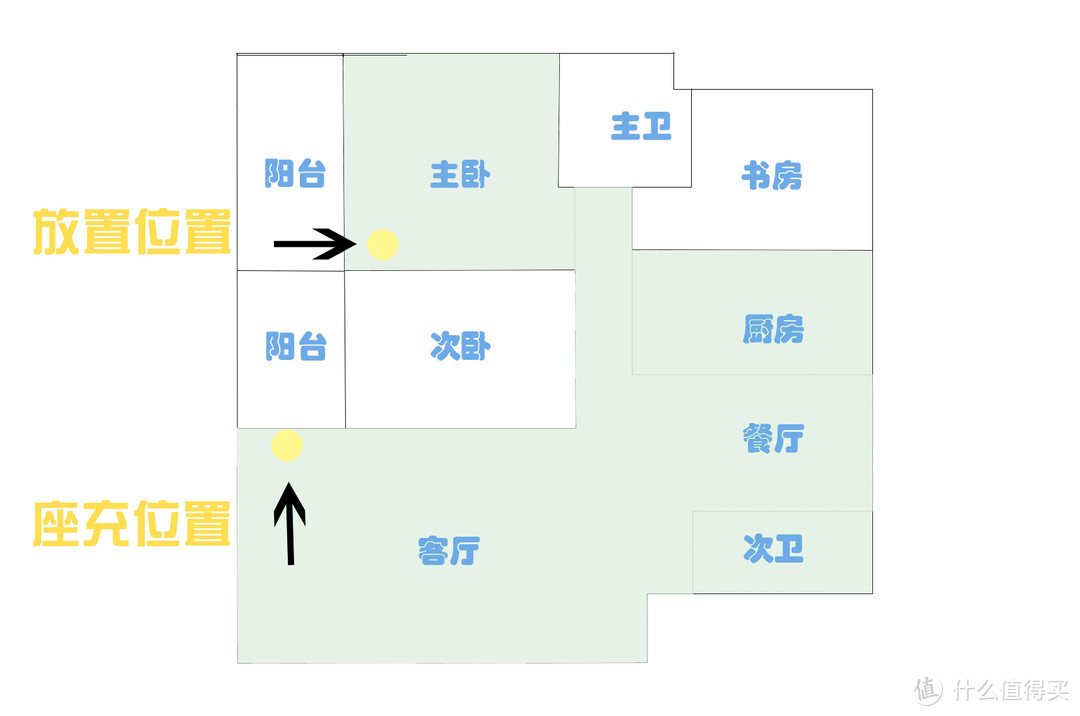
所以我直接拿去最远的房间启动,因为如果真的是3D建模,那么理论上在家中任何清扫过的位置启动都能马上知道自己在哪。

清扫地图(180°反转),确实十分惊讶,伊莱克斯 Pure i9 记得所有清扫过的地方,如何运作就不得而知了,但确实能知道自己在哪,并且记得座充在哪,这是机器人的认知新高度。
iRobot 970 虽然同为vSLAM导航,但“记忆”仅依靠天花板的特征,同一房间移动尚能继续正常工作,但有拐角甚至换房间就无法“回家”了,天花板的平面特征值过少不能提供足够的判断依据。
所以在环境认知上,伊莱克斯 Pure i9 是更高维度的存在,LDS(米家/石头等激光导航)是线、vSLAM(iRobot等视觉导航)是面、伊莱克斯的3D Vision则是3D建模立体的认知。
5.噪音测试。
均以全功率输出近距离测试噪音。
伊莱克斯 Pure i9

最大噪声达到了80db+,非常巨大的噪音。。
iRobot 970

75db左右,也不小。
感官上伊莱克斯 Pure i9 噪音更大,切从动轮是硬塑料材质无万向设计,与地板的碰撞声也非常大,噪音上还是有所欠缺。不过噪音高低不重要,毕竟开启之后都十分吵。
6.越障/躲避障碍测试。
像2.2cm越障这样的就不测了,没什么很大的含义。
宣传的“有些东西一次都不能碰”以及防缠绕这样的避障才是重点。
所以下面测试线材防缠绕以及“不能碰”。
防缠绕

障碍物设置,依然是上次测试里的3种线材,软质粗绳、硬质电源线、软质数据线。

iRobot 970 之前测过,这次直接搬过来,iRobot是依靠一系列的脱困程序来摆脱缠绕的,包括反转边刷与辊刷,调整自身姿态,宣称目前是足以应对2万种情况,实战确实还不错。

伊莱克斯 Pure i9,难度加大了,线材未绑紧,四散开来,能识别软质数据线与硬质电线,但软绳并未“看见”,直接向前冲了,不过边刷并未卷起软绳,由于低矮的机身设计,软绳也并未钻入机器底部绞进辊刷里,看行进路线似乎识别出了受干扰,有尝试脱困。
为了看清伊莱克斯 Pure i9 到底看不看得见软绳,再进行了一次清扫测试,软质粗绳+两更软质鞋带。均被缠住,不过并未进入辊刷,没有卡死,清扫一圈后绳索脱落了,其实看不出防缠绕……仅是机身设计的优势。
一次都不能碰
这里加试个“一次都不能碰”项目,这是伊莱克斯Pure i9 的特质,不触碰。
海洋球障碍物:
看得出伊莱克斯 Pure i9在尽力避让海洋球了,不过还是边角触碰到了,这是三角形机身的劣势,旋转过程中半径较大,且旋转+转向让机器人并不是以三角形的中心为圆心的旋转。

iRobot 970 ,其那面说过iRobot 是以碰撞为基础的清扫模式,碰到为止,轻质的海洋球基本形同空气,“海洋球?什么海洋球?根本没看见”机器人是以一定的力撞不动为依据的路径规划。

再来看一个伊莱克斯Pure i9的“一次都不能碰”,可能是透明瓶身的原因,飞奔过来的时候没刹住车,不过后面做到了没有碰。iRobot我就不测了,显而易见瓶子会倒花也会被吃进去。
穿帘测试
不碰撞带来的缺点也很明显,窗帘下面不会去,稍有遮挡就掉头了。


设置了一道桌布窗帘,单层桌布阻力十分小,可以轻松穿越。
iRobot直接穿过了窗帘,稍作减速标明探测到了障碍物,但依然进行碰撞探探虚实。
伊莱克斯Pure i9则看到了窗帘,甚至连延边轨迹都贴合窗帘的弯曲边沿,但不会穿过去。
所以避障/脱困方面,二者是完全不同的策略。
伊莱克斯Pure i9:前面有东西?不去了,绕过去试试。
iRobot :前面有东西?碰碰试试。
相较而言伊莱克斯Pure i9的优势是绝不触碰,不伤家具,不碰各种零零碎碎的东西,也保护自己,试用10天,除了沾点灰尘其他地方依旧如新。
尘盒

尘盒的容量上伊莱克斯算非常大的水平,清扫面积26㎡,自动清扫7天仍有余量。

对比iRobot970可以一眼看出伊莱克斯更大,滤网也更大。
总结

全靠“眼技”的伊莱克斯Pure i9,凭一眼之力省去了众多传感器,减少了几乎所有碰撞,这不得不让我再次展望今年的扫地机器人行业了,搅局者已经出现了。3D建模这是更高阶的导航方式,就像人眼一样,你能看见路就完全不需要带个拐杖探路了,在大部分扫地机器人都是凭借简单的线图与碰撞摸黑走夜路的时代,这枚眼睛确实带来了革命性的技术提升。
不过作为扫地机器人行业的新手,伊莱克斯Pure i9只能算是个初学者,虽然眼睛明亮,但是配套APP及智能规划方案并不十分出众,仍需调教。
具体的体现是不够智能,甚至出现低级的漏扫情况,而且对于这个眼的运用并未达到极致。就像虽然拥有个高等生物的身躯,但是大脑尚未开发,只能做点简单的事情。
3D Vision能实现的远不止于此,还是期待伊莱克斯的工程师们今后带来更高阶的“大脑”。
最后,您的点赞收藏打赏是我努力评测分享的动力
本文商品由什么值得买提供,并邀请用户撰写评测报告。更多新奇好物请关注众测活动~















柯皓不是柯南
校验提示文案
rochet
校验提示文案
我是会飞de树
校验提示文案
sdfenger
校验提示文案
Sarl
校验提示文案
值友1841628112
校验提示文案
JOHNLIU-EASY
校验提示文案
柯皓不是柯南
校验提示文案
浅笑落樱花
校验提示文案
低调的某路
之前看过你的测评,其实一直很疑惑市面产品怎么应对饭桌配几张椅子这种障碍的。希望能测试一下
校验提示文案
superman0
校验提示文案
如风飞天虎
校验提示文案
奔跑的皮芽子
校验提示文案
Huckleberry
校验提示文案
赛车手2012
校验提示文案
值友8518841521
校验提示文案
不是看客是乘客
校验提示文案
孤单盛宴
校验提示文案
自在如风001
校验提示文案
值友1841628112
校验提示文案
值友5485225135
校验提示文案
值友1841628112
校验提示文案
值友1841628112
校验提示文案
如风飞天虎
校验提示文案
自在如风001
校验提示文案
孤单盛宴
校验提示文案
superman0
校验提示文案
Sarl
校验提示文案
不是看客是乘客
校验提示文案
sdfenger
校验提示文案
值友8518841521
校验提示文案
我是会飞de树
校验提示文案
赛车手2012
校验提示文案
Huckleberry
校验提示文案
低调的某路
之前看过你的测评,其实一直很疑惑市面产品怎么应对饭桌配几张椅子这种障碍的。希望能测试一下
校验提示文案
浅笑落樱花
校验提示文案
rochet
校验提示文案
柯皓不是柯南
校验提示文案
柯皓不是柯南
校验提示文案
奔跑的皮芽子
校验提示文案